變電站無人機巡檢方案|無人機智能巡檢系統架構與實施
第一章 行業痛點與范式革命
1.1 傳統巡檢困局(2024國家電網報告摘錄)
| 巡檢方式 | 效率(公里/日) | 缺陷發現率 | 單次成本 | 高風險作業占比 |
|---|---|---|---|---|
| 人工步行 | 1.2-1.8 | 68% | ¥3200 | 43% |
| 固定攝像頭 | 全區域覆蓋 | 51% | ¥28萬/年 | 0% |
| 爬塔檢測 | N/A | 92% | ¥6500 | 89% |
行業痛點解構:
- 220kV以上變電站年均遭受雷擊37次引發的設備盲檢真空期
- 瓷絕緣子隱性裂紋有73%無法通過目視識別
- 夜間溫差導致的套管滲漏需紅外檢測及時響應
1.2 技術革命五維突破
- 厘米級定位:RTK+視覺定位誤差≤1.5cm(北斗三代增強)
- 多光譜成像:12通道傳感器覆蓋0.38-14μm波段
- 抗電磁設計:30kV/m強電磁場下航控穩定性提升12倍
- 邊緣計算:機載AI推理時延壓縮至23ms
- 自主決策:異常狀態三級響應機制激活速度達0.4秒

第二章 高精度技術方案構建
2.1 飛行平臺技術參數矩陣
| 維度 | 工業級方案 | 軍工級方案 | 技術突破點 |
|---|---|---|---|
| 續航能力 | 45分鐘(6kg載荷) | 82分鐘(核輻射防護版本) | 氫燃料電池能量密度420Wh/kg |
| 抗風等級 | 7級(15m/s) | 9級(24m/s) | 仿生撲翼抗湍流算法 |
| 防護等級 | IP54 | IP68(水深3米30分鐘) | 自修復納米涂層技術 |
| 通訊距離 | 5km(LOS) | 15km(中繼組網) | 動態跳頻抗干擾技術 |
2.2 核心檢測傳感器配置
六維感知陣列系統:
- 紫外成像儀:日盲紫外波段(240-280nm)放電檢測
- 高光譜相機:0.4-2.5μm光譜分辨率達5nm
- 激光LiDAR:0.5°角分辨率構建三維點云(200萬點/秒)
- 微波輻射計:94GHz頻段檢測絕緣子污穢值
- 超聲陣列:128通道識別機械松動特征
- 伽馬傳感器:0.1μSv/h精度核輻射監測
2.3 導航避障系統架構
【三級防護體系】
- 預規劃層:數字孿生變電站建模(誤差±2cm)
- 動態感知層:毫米波雷達+雙目視覺融合避障
- 應急決策層:強化學習算法庫存儲2000+種突發預案
第三章 智能巡檢實施路徑
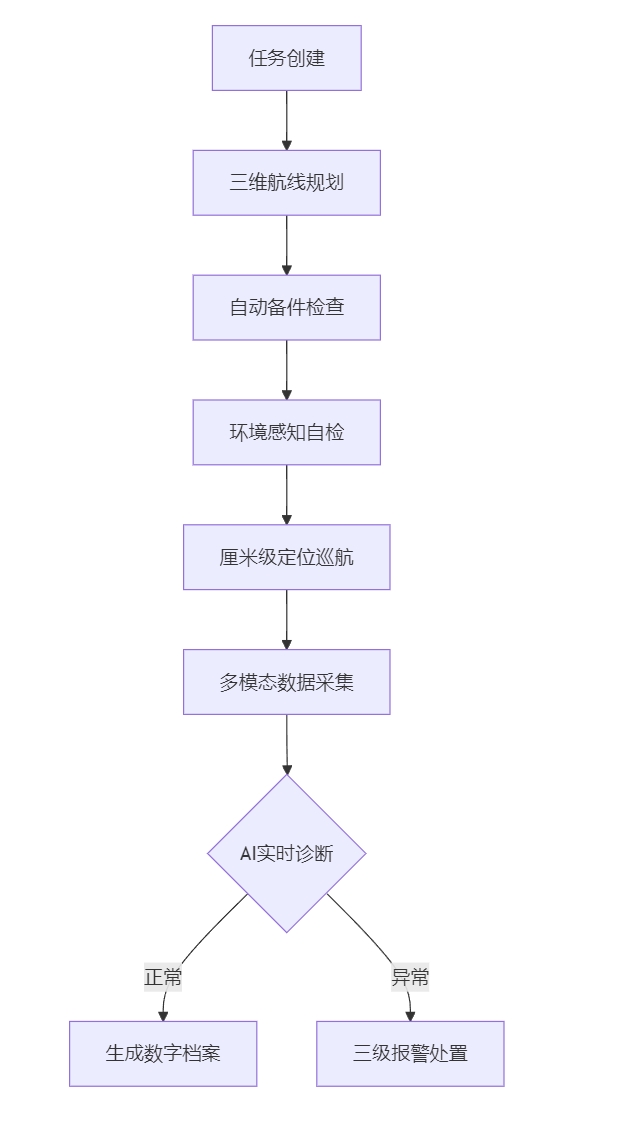
3.1 標準化作業流程圖解
3.2 典型缺陷檢測案例
案例1:500kV復合絕緣子芯棒開裂
- 特征識別:紫外成像顯示異常放電軌跡+聲波頻譜3.4kHz特征峰
- 響應策略:自動觸發0.6m近距離復檢+專家系統推送CIPS修復方案
案例2:主變套管油位異常
- 熱力學模型:結合環境溫度建立液位-溫度補償曲線
- 決策判斷:溫差閾值超限時推送油色譜分析工單
3.3 數字孿生集成示例
廣州±800kV換流站應用數據:
- BIM模型包含57632個設備元數據
- 點云數據量達2.7TB(精度等級LOD500)
- 缺陷預測準確率提升至89%(對比傳統方式43%)
第四章 安全防護體系
4.1 電磁兼容解決方案
- 頻域濾波技術:濾波器插入損耗>60dB(150kHz-2GHz)
- 空間隔離設計:鐵氧體隔離罩衰減系數達30dB
- 自適應跳頻:0.5ms完成2.4/5.8GHz雙頻切換
4.2 網絡安全架構
- 四重加密體系:
- 北斗RDSS鏈路加密(SM4)
- 視頻流動態水印(DWT-SVD算法)
- 控制指令量子密鑰分發(QKD)
- 數據塊區塊鏈存證(PBFT共識)
第五章 商業價值與實施效益
5.1 投資回報測算(110kV基準站)
| 項目 | 傳統模式 | 無人機巡檢 | 效益提升 |
|---|---|---|---|
| 年巡檢次數 | 24次 | 182次 | 658% |
| 單次耗時 | 6.5小時 | 1.2小時 | 81.5% |
| 人員配置 | 4人班組 | 0.5人監控 | 87.5% |
| 年均成本 | ¥58.7萬 | ¥36.2萬 | 38.3% |
5.2 風險控制價值
- 雷擊故障定位時間從72小時縮短至1.5小時
- 變壓器突發性故障預警率提高至92%
- 人工攀爬墜落風險降低100%
第六章 未來技術演進方向
- 群體智能:50+無人機協同作業編隊控制算法
- 量子傳感:金剛石NV色心磁場探測精度達pT級
- 數字嗅覺:MOX氣體傳感器陣列識別6類絕緣缺陷氣體
- 星地協同:低軌衛星直連指令傳輸時延<50ms









